
Project Background
Continuum manipulators are uniquely suited for many tasks beyond the capabilities of traditional rigid link manipulators. They can operate in tight spaces where rigid link manipulators may not fit, and they can navigate around obstacles to reach distant objects. For example, continuum manipulators are able to safely navigate the complex environment of the human body; therefore, they have many applications in the medical field for minimally invasive procedures such as sinus surgery and ACL surgery.
We have previously prototyped a continuum manipulator. It consists of multiple segments and these segments are connected via springs and joints. To actuate the manipulator, i.e., changing its shape to adapt to an object, three cables are used, in a coordinated fashion, to pull the segments to the desired shape. Due to the underactuated nature of this manipulator, controlling its shape turns out to be a complex mathematical problem.
In this project, we propose to solve this problem by learning from how humans perform this task manually. This may help us design control algorithms to automatically perform this task by using electric motors. To this end, a manual control transmission is first needed to be carefully designed and tested. This manual transmission, possibly consists of pulleys, gears, and sensors, will allow a human user to interface with the cables of the soft manipulator. Experiments will then be performed to collect observational data from human subjects performing manipulation tasks, e.g., grasping an object or positioning the endpoint of the manipulator in space. Kinematic, kinetic, physiological, and vision data will be collected and analyzed.
Student Role
The undergraduate student is expected to work full-time (40 hours weekly) and will be responsible of three main tasks:
- Design a manual transmission system,
- Perform guided experiments with human subjects and collect data,
- Analyze visualize the data.
In the first task, the student needs to first design a computer model of the system using software. After discussing with the PI, the student may proceed and physically build this system and test it with the continuum manipulator. The student will experience ample hands-on experience with both hardware and software.
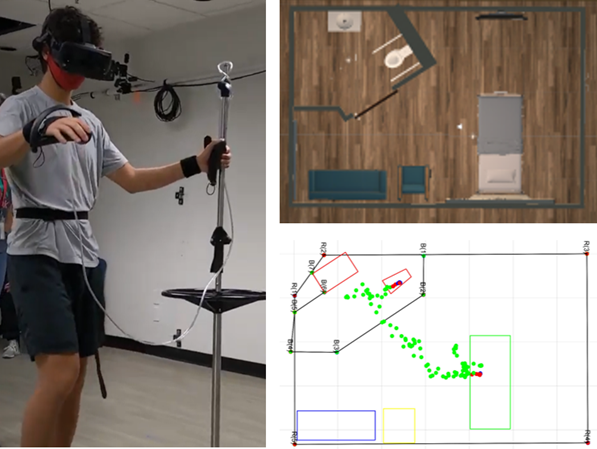
In the second task, the student will shadow a graduate mentor on the human data collection. The student will be responsible of helping the mentor running the experiment and learning how to use modern sensors to collect human data, such as surface electromyography (EMG) and gaze data through video images. The student will be trained and certified for conducting human research prior to helping the experiments.
In the third task, the student will learn how to process data collected from human experiments, such as data filtering and conditioning. Then, the student will also be responsible to visualize the processed data and compute outcome measures as needed.
Student Learning Outcomes and Benefits
The student will have the opportunity to work in a multidisciplinary laboratory. The PI will provide needed research resources and mentorship throughout the program. A graduate student will be assigned to also mentor the student during his/her stay.
The student is expected to learn skills that are relevant to robotics research, such as computer-aided design, manufacturing, mechatronics, and testing. Additionally, the student will gain opportunity to work with human experimentation, including movement sensors, data collection and processing, and analysis. This project will help the student learn how to conduct research, how to acquire skills as needed, and how to communicate and collaborate with others in a laboratory setting.
The student may also gain opportunity to present and share his/her results from this novel project through manuscript preparation and conference presentations. The student will be encouraged to complete all programmatic aspects of SPUR, including attending orientation, bi-weekly meetings and weekly URES events, presenting at the Summer Symposium, and publishing an abstract in the University of Utah Undergraduate Research Journal.
Haohan Zhang
The PI will be straightforward with the student and make himself available as much as possible. The PI will clearly describe the research and expectation at the beginning of the program.
The PI will provide the student a desk and a computer for work. The PI will assign a graduate student to closely work with the student. The PI will meet with the student weekly to closely supervise the progress made towards the research goal. Additionally, the student is welcome to schedule other times to meet with the PI to discuss research or other personal needs.
The student is expected to write a short progress report (half-page) weekly to inform the research progress and challenges he/she may be facing. This rapid communication allows the PI to help the student to find solutions or adjust the project appropriately. Additionally, the student is expected to make short presentation bi-weekly during the PI research group meeting. This helps improve the student's communication skills and also provide an opportunity for the entire research to provide critical feedback.
The PI and the graduate student mentor will periodically provide learning tutorials and toy problems to the student as needed. Some examples can be found on PI's website. This will help the student to gain self-learning skills and provide him/her with steppingstones towards solving harder problems.